


技术详细介绍
1、 成果主要用途
用于核电、压力容器、石油化工等行业不锈钢、铝等材质的装备制造高效焊接。
2、 成果主要特点
(1)焊枪及其摆动机构可旋转180度,能实现行车正反双向的TIG自动焊接。
(2)摆动模式为角摆,提升了焊缝熔合质量和焊缝成形,提高了坡口的适应性。
(3)采用真空吸盘柔性轨道,适用于不锈钢、铝等材质的自动焊接。
(4)配置有弧长自动跟踪系统,并配有焊接参数管理系统和焊缝轨迹示教跟踪,能实现焊接过程的运动姿态和焊接参数自动控制。
(5)配置焊接过程微型视频监控系统,实现焊接过程场景和熔池高清双视频监控。
(6)配备UPS电源,保障系统在断电等特殊情况下的安全工作。
3、 简要工作原理
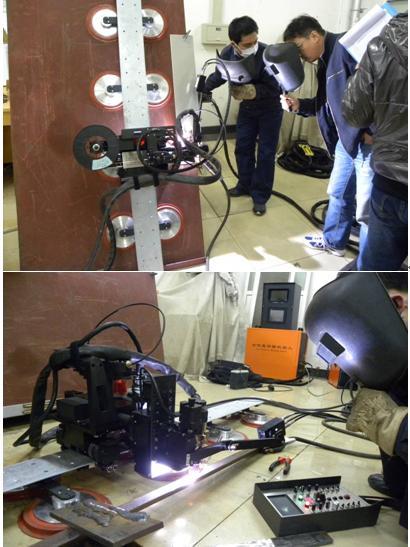
TIG焊接机器人主要由焊接机器人小车,真空吸盘柔性轨道、控制柜、视频监控系统、焊接电源、真空泵及UPS电源等构成,安装后的焊接机器人主体部分如图所示。

4、 主要技术指标



5、 主要工程案例
TIG焊接机器人已经成功应用于中国核工业华兴建设有限公司广东阳江项目中。

图2 TIG焊接机器人工艺试验